新一代信息技術(shù)
一種低紋理環(huán)境下基于點線特征的視覺SLAM方法
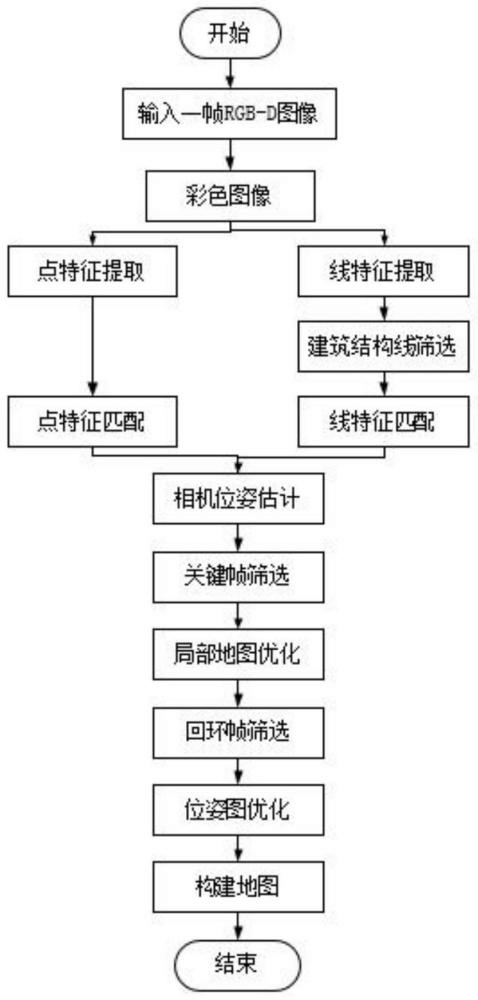
一種低紋理環(huán)境下基于點線特征的視覺SLAM方法,涉及計算機視覺技術(shù)領(lǐng)域�����。本發(fā)明在ORB?SLAM2系統(tǒng)上進行擴展��,提取圖像中的點特征和線特征����,在普通的線特征基礎(chǔ)上篩選出建筑結(jié)構(gòu)線特征�,得到點特征和建筑結(jié)構(gòu)線特征�����;利用點特征和建筑結(jié)構(gòu)線特征進行特征匹配���,使用RANSAC算法剔除誤匹配對���;根據(jù)相鄰幀推導(dǎo)出的重投影誤差模型估計相機位姿;順次執(zhí)行后端優(yōu)化與回環(huán)檢測線程�,從而提高系統(tǒng)在低紋理場景中的穩(wěn)定性和魯棒性,最終實現(xiàn)面向低紋理環(huán)境下的基于點線特征的視覺SLAM方法���。
長春工業(yè)大學(xué)
授權(quán)發(fā)明